
发布者:凯思软件发布日期:2021-05-08浏览量:

要准确仿真防锁死制动系统 (ABS) ,需要在不同物理域中准备各个子系统详细模型。使用统一分析工具为制动、车轮和控制组件创建精细模型难度非常大,甚至可以说是不可能。但可以采用联合仿真的策略来解决这一难题。同时使用不同的仿真工具能够实现创建跨专业、跨领域的耦合模型。
在本技术简介中,使用Abaqus和Dymola的联合仿真方法实现ABS的现实系统级仿真。轮胎、车轮、制动钳机制和道路可以使用详细的Abaqus有限元模型仿真,制动系统控制算法和液压系统则可以使用Dymola进行仿真。
一套防锁死制动系统可以视为机械和逻辑子系统的总成。机械系统由轮胎、车轮、光盘和制动卡钳硬件组成,而逻辑系统则由液压系统和控制电子设备组成。Abaqus具备强大的非线性连续能力和多样化的建模功能,已被证明是轮胎仿真的理想工具。Dymola则有能力高效率抽象逻辑建模,是液压系统和控制系统仿真的理想之选。
对整个ABS的高逼真系统级仿真来说,单独使用其中之一都无法取得理想的效果。为此目的展示了一种联合仿真方法,在运行中将Abaqus和Dymola耦合起来仿真系统的动态情况,这是任意一种单一软件无法做到的。车轮系统的结构响应和控制系统的逻辑响应在Abaqus 和Dymola之间同步交换。由此施加在车轮上的制动负荷由ABS电子逻辑根据来自机械系统的输入加以控制
分析方法
本研究考查的是无悬挂组件的单个车轮。为实现联合仿真,Abaqus和Dymola模型必须有对应的通信接口。这可以通过在Abaqus模型中定义传感器和执行器,向Dymola逻辑模型收发信号来实现。制动分析的对象是使用逐渐增大的制动踏板力量让车轮总成从初始速度10m/s降速下来。
制动系统的机械状态用作控制信号。Dymola使用它激励Abaqus模型中的卡钳,这样就能够施加和调制制动力,避免车轮锁死或在路面上彻底打滑。

Dymola中的制动控制系统
Dymola逻辑模型的原理方框图见图1。该制动系统由通过三端口阀门连接到主制动缸的单制动卡钳气缸组成。三端口阀门有三种工作模式:主制动缸与从制动缸相连的增压模式;所有端口断开的保持模式;从制动缸与油槽相连的减压模式。该系统代表ABS实现的简单形式,即制动液在制动事件发生之后才返回主制动缸。
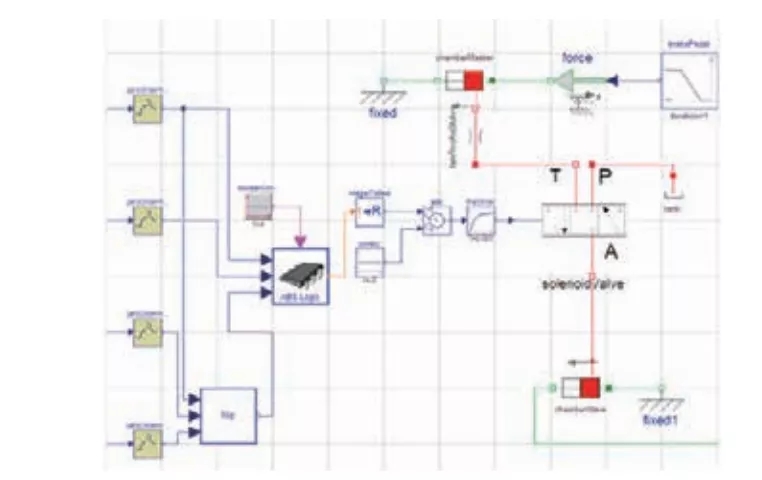
图1:Dymola中的制动系统逻辑和液压控制模型远离框图
主要特点和优势
• Abaqus和Dymola联合仿真能实现嵌入在复杂的逻辑控制系统兼容的结构耦合的时域仿真。• Abaqus中的准确详细的静动态非线性轮胎建模仿真
通过让三端口阀门的工作状态取决于车轮加速与滑动,对控制机制进行了仿真。在控制算法中,要求的输入有车轮的角速度ω、角加速度ω、滚动半径r、轮毂纵向速度Vx。对控制器的输入信号按Ts=1ms的周期采样。纵向滑动的计算为:
在车轮减速下降到低于当前规定的阈值-a时就会触发ABS。此时压力会保持恒定,直至滑动超过阈值λT,此时压力下降到一定的值。
随即保持压力直至达到正加速度A。然后压力一路增大直到加速度下降到a。到这个阶段,使用交替性的保持和增大命令缓慢提升压力。这个过程便于缓慢地穿越摩擦特性曲线的峰值部分,直至抵达该曲线的不稳定点一侧。这个周期在-a当加速度阈值跨过之后会再度开始。
除了这种常规的控制周期,当纵向速度小于特定水平时也会解除该控制器。此外,如果ABS控制算法处于某种状态过长时间,也会使用超时参数重置ABS控制算法。
这样可以在不需要制动行为时避免控制器被锁死。这是一种基于规则的算法,常见于生产系统。另一种选择是使用基于模型的算法。
Abaqus中的轮胎、道路和制动模型
如图2所示的Abaqus模型,包含轮胎、车轮、制动卡钳和制动转子、道路组成。首先为轮胎充压,放置到与路面接触,直至车身重量作用到车轮上。然后在Abaqus/Standard中执行稳态传输分析,计算在无制动条件下给定的前向速度对应的轮胎应力状态和变形。还可以选择给定圆角半径。
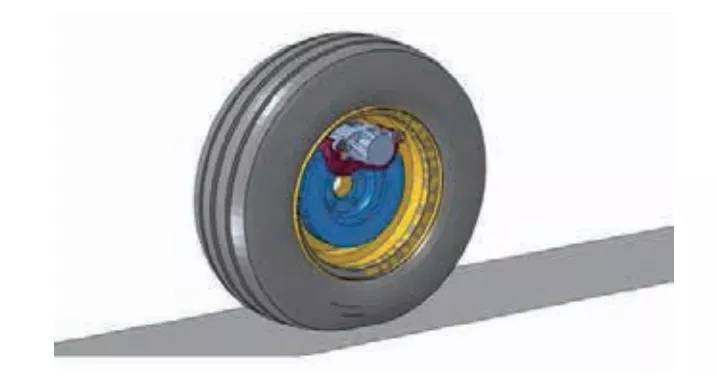
图2:Abaqus轮胎、道路和制动模型
随后将自由滚动状态的轮胎导入Abaqus/Explicit,用于与Dymola的制动联合仿真。在Abaqus/Explicit计算滚动轮胎中的应力状态和形变时,车轮的角速度和角加速度会通过Abaqus的传感器定期提供给Dymola。所需的制动压力先由Dymola计算,然后返回Abaqus/Explicit,以施加在制动卡钳缸上。随后制动盘压紧制动盘,产生制动力矩,为车轮总成减速。
联合仿真方案
使用下列非迭代联合仿真方案:每次Abaqus仿真的增量——传感器信息经计算后通过基于套接的接口传递给Dymola。
Dymola读取用作控制逻辑输入的Abaqus传感器信息,并按Abaqus/Explicit使用的增量大小及时完成传递。Dymola中计算的激励信号传递回Abaqus,由Abaqus将该新计算的负荷施加于下一增量上。
这一过程反复进行,直至仿真时间用尽。
联合仿真结果
图3所示的是轮毂在联合仿真中的纵向速度和圆周速度。两个 量 之间的差异代 表滑动状 态。滑动开始时 较大,但控制器能够防止车轮锁死。
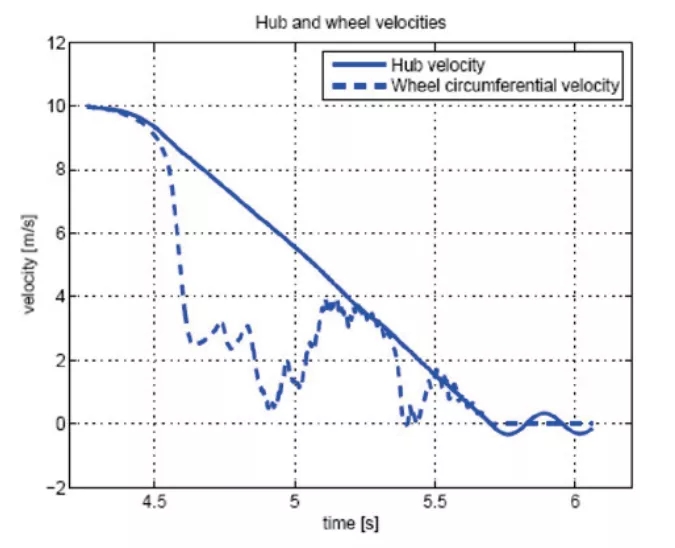
图3:联合仿真过程中的轮毂纵向和车轮圆周速度
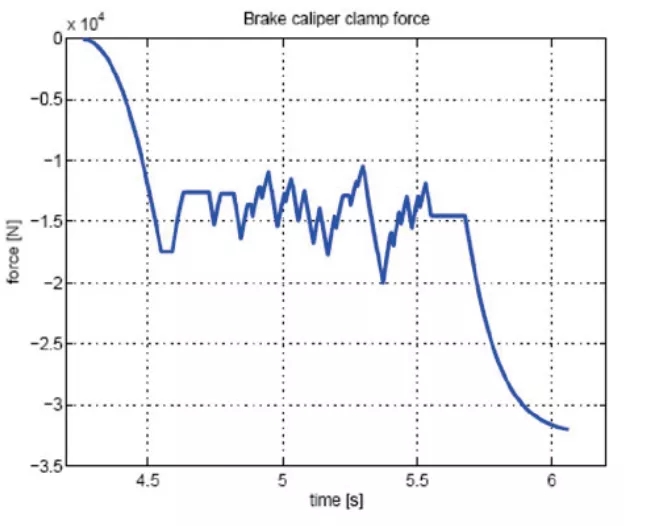
图4:制动卡钳联合仿真过程中的夹持力
图4所示的是联合仿真过程中的制动卡钳的夹持力。快速力积聚和释放阶段都清晰可见。
结论
在本技术简介中,开发了一种分析防锁死制动控制系统的联合仿真方案。将Abaqus中的高逼真轮胎模型与Dymola中的液压制动控制系统模型相结合,增强了如何将不同的仿真软件包整合在一起使用,执行现实系统级仿真。因此能够将Abaqus中现有的高级轮胎建模功能应用到更加广泛的现实工作条件下。这种联合仿真方法可以扩展到各种道路条件下、水漂分析和优化完整的车辆模型。
“这里提供了您所在地区的具体联系人,负责回答有关凯思软件产品的所有问题”
您和联系人最直接的沟通桥梁
咨询我们,获取您的解决方案Copyright © 2019 广州市凯思软件工程有限公司 粤ICP备11099638号-1